


检测子像素中的corners位置
2018-10-12 10:17 更新
目标
在本教程中,您将学习如何:
- 使用OpenCV函数cv :: cornerSubPix查找更准确的corners位置(比整数像素更准确)。
Code
本教程代码如下所示。您也可以从这里下载
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/imgproc.hpp"
#include <iostream>
using namespace cv;
using namespace std;
Mat src, src_gray;
int maxCorners = 10;
int maxTrackbar = 25;
RNG rng(12345);
const char* source_window = "Image";
void goodFeaturesToTrack_Demo( int, void* );
int main( int, char** argv )
{
src = imread( argv[1], IMREAD_COLOR );
cvtColor( src, src_gray, COLOR_BGR2GRAY );
namedWindow( source_window, WINDOW_AUTOSIZE );
createTrackbar( "Max corners:", source_window, &maxCorners, maxTrackbar, goodFeaturesToTrack_Demo );
imshow( source_window, src );
goodFeaturesToTrack_Demo( 0, 0 );
waitKey(0);
return(0);
}
void goodFeaturesToTrack_Demo( int, void* )
{
if( maxCorners < 1 ) { maxCorners = 1; }
vector<Point2f> corners;
double qualityLevel = 0.01;
double minDistance = 10;
int blockSize = 3, gradiantSize = 3;
bool useHarrisDetector = false;
double k = 0.04;
Mat copy;
copy = src.clone();
goodFeaturesToTrack( src_gray,
corners,
maxCorners,
qualityLevel,
minDistance,
Mat(),
blockSize,
gradiantSize,
useHarrisDetector,
k );
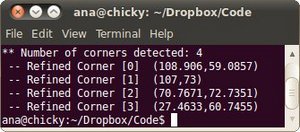
cout<<"** Number of corners detected: "<<corners.size()<<endl;
int r = 4;
for( size_t i = 0; i < corners.size(); i++ )
{ circle( copy, corners[i], r, Scalar(rng.uniform(0,255), rng.uniform(0,255), rng.uniform(0,255)), -1, 8, 0 ); }
namedWindow( source_window, WINDOW_AUTOSIZE );
imshow( source_window, copy );
Size winSize = Size( 5, 5 );
Size zeroZone = Size( -1, -1 );
TermCriteria criteria = TermCriteria( TermCriteria::EPS + TermCriteria::COUNT, 40, 0.001 );
cornerSubPix( src_gray, corners, winSize, zeroZone, criteria );
for( size_t i = 0; i < corners.size(); i++ )
{ cout<<" -- Refined Corner ["<<i<<"] ("<<corners[i].x<<","<<corners[i].y<<")"<<endl; }结果

这是结果:
以上内容是否对您有帮助:


更多建议: