


OpenCV为轮廓创建边界框和圆
2018-09-27 11:35 更新

目标
在本教程中,您将学习如何:
- 使用OpenCV函数cv :: boundingRect
- 使用OpenCV函数cv :: minEnclosingCircle
Code
本教程代码如下所示。您也可以从这里下载
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/imgproc.hpp"
#include <iostream>
using namespace cv;
using namespace std;
Mat src; Mat src_gray;
int thresh = 100;
int max_thresh = 255;
RNG rng(12345);
void thresh_callback(int, void* );
int main( int, char** argv )
{
src = imread( argv[1], IMREAD_COLOR );
cvtColor( src, src_gray, COLOR_BGR2GRAY );
blur( src_gray, src_gray, Size(3,3) );
const char* source_window = "Source";
namedWindow( source_window, WINDOW_AUTOSIZE );
imshow( source_window, src );
createTrackbar( " Threshold:", "Source", &thresh, max_thresh, thresh_callback );
thresh_callback( 0, 0 );
waitKey(0);
return(0);
}
void thresh_callback(int, void* )
{
Mat threshold_output;
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
threshold( src_gray, threshold_output, thresh, 255, THRESH_BINARY );
findContours( threshold_output, contours, hierarchy, RETR_TREE, CHAIN_APPROX_SIMPLE, Point(0, 0) );
vector<vector<Point> > contours_poly( contours.size() );
vector<Rect> boundRect( contours.size() );
vector<Point2f>center( contours.size() );
vector<float>radius( contours.size() );
for( size_t i = 0; i < contours.size(); i++ )
{
approxPolyDP( Mat(contours[i]), contours_poly[i], 3, true );
boundRect[i] = boundingRect( Mat(contours_poly[i]) );
minEnclosingCircle( contours_poly[i], center[i], radius[i] );
}
Mat drawing = Mat::zeros( threshold_output.size(), CV_8UC3 );
for( size_t i = 0; i< contours.size(); i++ )
{
Scalar color = Scalar( rng.uniform(0, 255), rng.uniform(0,255), rng.uniform(0,255) );
drawContours( drawing, contours_poly, (int)i, color, 1, 8, vector<Vec4i>(), 0, Point() );
rectangle( drawing, boundRect[i].tl(), boundRect[i].br(), color, 2, 8, 0 );
circle( drawing, center[i], (int)radius[i], color, 2, 8, 0 );
}
namedWindow( "Contours", WINDOW_AUTOSIZE );
imshow( "Contours", drawing );
}说明
主要功能相当简单,如下所述:
- 打开图像,将其转换为灰度,并将其模糊以摆脱噪点。
src = imread( argv[1], IMREAD_COLOR ); cvtColor( src, src_gray, COLOR_BGR2GRAY ); blur( src_gray, src_gray, Size(3,3) ); - 创建一个标题为“Source”的窗口,并在其中显示源文件。
const char* source_window = "Source"; namedWindow( source_window, WINDOW_AUTOSIZE ); imshow( source_window, src ); - 在source_window上创建一个跟踪栏,并为其分配一个回调函数。一般来说,回调函数用于对某种信号做出反应,在我们的例子中它是跟踪栏的状态变化。
createTrackbar( " Threshold:", "Source", &thresh, max_thresh, thresh_callback ); - 显式的一次性电话thresh_callback是必要的同时显示“轮廓”窗口与“源”窗口。
thresh_callback( 0, 0 ); - 等待用户关闭窗口。
waitKey(0);
回调函数thresh_callback执行所有有趣的工作。
- 写入
threshold_output灰度图片的阈值(您可以在这里查看阈值)。
threshold(src_gray,threshold_output,thresh,255,THRESH_BINARY);
- 找到轮廓并将其保存到向量
contour和hierarchy。
findContours(threshold_output,contour,hierarchy,RETR_TREE,CHAIN_APPROX_SIMPLE,Point(0,0));
- 对于每个找到的轮廓,我们现在将逼近逼近具有精度±3的多边形,并表示曲线必须关闭。
之后,我们为每个多边形找到一个边界,并将其保存boundRect。
最后,我们发现每一个多边形的最小封闭圈,并保存到center和radius载体
for( size_t i = 0; i < contours.size(); i++ )
{
approxPolyDP( Mat(contours[i]), contours_poly[i], 3, true );
boundRect[i] = boundingRect( Mat(contours_poly[i]) );
minEnclosingCircle( contours_poly[i], center[i], radius[i] );
}我们发现了我们需要的一切,我们所要做的就是绘制。
- 创建新的无符号8位字符的Mat,填充零。它将包含我们要制作的所有图纸(直角和圆圈)。
Mat drawing = Mat::zeros( threshold_output.size(), CV_8UC3 );
- 对于每个轮廓:选择随机颜色,绘制轮廓,边界矩形和最小包围圆,
for( size_t i = 0; i< contours.size(); i++ )
{
Scalar color = Scalar( rng.uniform(0, 255), rng.uniform(0,255), rng.uniform(0,255) );
drawContours( drawing, contours_poly, (int)i, color, 1, 8, vector<Vec4i>(), 0, Point() );
rectangle( drawing, boundRect[i].tl(), boundRect[i].br(), color, 2, 8, 0 );
circle( drawing, center[i], (int)radius[i], color, 2, 8, 0 );
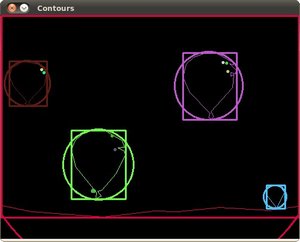
}- 显示结果:创建一个新窗口“轮廓”,并显示我们添加到图纸上的所有内容。
namedWindow( "Contours", WINDOW_AUTOSIZE );
imshow( "Contours", drawing );结果
这里是:

以上内容是否对您有帮助:


更多建议: