


功能匹配FLANN
2018-10-12 10:32 更新
目标
在本教程中,您将学习如何:
- 使用cv :: FlannBasedMatcher接口,以便通过使用多维空间模块中的聚类和搜索来执行快速高效的匹配。
Code
本教程代码如下所示。
/*
* @file SURF_FlannMatcher
* @brief SURF detector + descriptor + FLANN Matcher
* @author A. Huaman
*/
#include <stdio.h>
#include <iostream>
#include <stdio.h>
#include <iostream>
#include "opencv2/core.hpp"
#include "opencv2/features2d.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/xfeatures2d.hpp"
using namespace std;
using namespace cv;
using namespace cv::xfeatures2d;
void readme();
/*
* @function main
* @brief Main function
*/
int main( int argc, char** argv )
{
if( argc != 3 )
{ readme(); return -1; }
Mat img_1 = imread( argv[1], IMREAD_GRAYSCALE );
Mat img_2 = imread( argv[2], IMREAD_GRAYSCALE );
if( !img_1.data || !img_2.data )
{ std::cout<< " --(!) Error reading images " << std::endl; return -1; }
//-- Step 1: Detect the keypoints using SURF Detector, compute the descriptors
int minHessian = 400;
Ptr<SURF> detector = SURF::create();
detector->setHessianThreshold(minHessian);
std::vector<KeyPoint> keypoints_1, keypoints_2;
Mat descriptors_1, descriptors_2;
detector->detectAndCompute( img_1, Mat(), keypoints_1, descriptors_1 );
detector->detectAndCompute( img_2, Mat(), keypoints_2, descriptors_2 );
//-- Step 2: Matching descriptor vectors using FLANN matcher
FlannBasedMatcher matcher;
std::vector< DMatch > matches;
matcher.match( descriptors_1, descriptors_2, matches );
double max_dist = 0; double min_dist = 100;
//-- Quick calculation of max and min distances between keypoints
for( int i = 0; i < descriptors_1.rows; i++ )
{ double dist = matches[i].distance;
if( dist < min_dist ) min_dist = dist;
if( dist > max_dist ) max_dist = dist;
}
printf("-- Max dist : %f \n", max_dist );
printf("-- Min dist : %f \n", min_dist );
//-- Draw only "good" matches (i.e. whose distance is less than 2*min_dist,
//-- or a small arbitary value ( 0.02 ) in the event that min_dist is very
//-- small)
//-- PS.- radiusMatch can also be used here.
std::vector< DMatch > good_matches;
for( int i = 0; i < descriptors_1.rows; i++ )
{ if( matches[i].distance <= max(2*min_dist, 0.02) )
{ good_matches.push_back( matches[i]); }
}
//-- Draw only "good" matches
Mat img_matches;
drawMatches( img_1, keypoints_1, img_2, keypoints_2,
good_matches, img_matches, Scalar::all(-1), Scalar::all(-1),
vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS );
//-- Show detected matches
imshow( "Good Matches", img_matches );
for( int i = 0; i < (int)good_matches.size(); i++ )
{ printf( "-- Good Match [%d] Keypoint 1: %d -- Keypoint 2: %d \n", i, good_matches[i].queryIdx, good_matches[i].trainIdx ); }
waitKey(0);
return 0;
}
/*
* @function readme
*/
void readme()
{ std::cout << " Usage: ./SURF_FlannMatcher <img1> <img2>" << std::endl; }结果
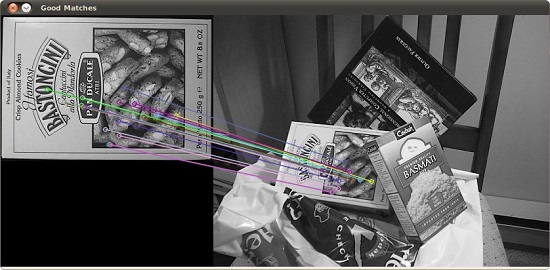
以下是应用于第一张图像的特征检测的结果:
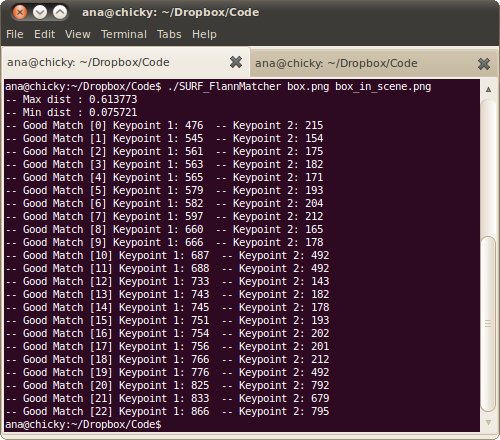
另外,我们得到作为控制台输出的关键点过滤:
以上内容是否对您有帮助:


更多建议: