


如何创建一个corner检测器
2018-10-12 10:15 更新

目标
在本教程中,您将学习如何:
- 使用OpenCV函数cv :: cornerEigenValsAndVecs来查找特征值和特征向量来确定像素是否是一个角。
- 使用OpenCV函数cv :: cornerMinEigenVal来找到拐角检测的最小特征值。
- 通过使用上述两个功能来实现我们自己的Harris检测器版本以及Shi-Tomasi检测器。
Code
本教程代码如下所示。您也可以从这里下载
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/imgproc.hpp"
#include <iostream>
using namespace cv;
using namespace std;
Mat src, src_gray;
Mat myHarris_dst; Mat myHarris_copy; Mat Mc;
Mat myShiTomasi_dst; Mat myShiTomasi_copy;
int myShiTomasi_qualityLevel = 50;
int myHarris_qualityLevel = 50;
int max_qualityLevel = 100;
double myHarris_minVal; double myHarris_maxVal;
double myShiTomasi_minVal; double myShiTomasi_maxVal;
RNG rng(12345);
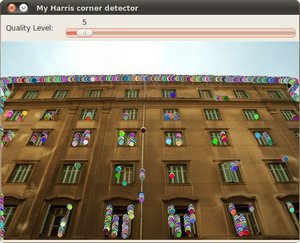
const char* myHarris_window = "My Harris corner detector";
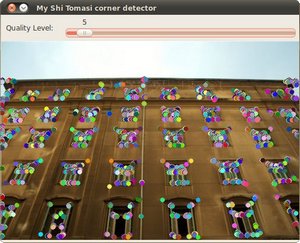
const char* myShiTomasi_window = "My Shi Tomasi corner detector";
void myShiTomasi_function( int, void* );
void myHarris_function( int, void* );
int main( int, char** argv )
{
src = imread( argv[1], IMREAD_COLOR );
cvtColor( src, src_gray, COLOR_BGR2GRAY );
int blockSize = 3; int apertureSize = 3;
myHarris_dst = Mat::zeros( src_gray.size(), CV_32FC(6) );
Mc = Mat::zeros( src_gray.size(), CV_32FC1 );
cornerEigenValsAndVecs( src_gray, myHarris_dst, blockSize, apertureSize, BORDER_DEFAULT );
/* calculate Mc */
for( int j = 0; j < src_gray.rows; j++ )
{ for( int i = 0; i < src_gray.cols; i++ )
{
float lambda_1 = myHarris_dst.at<Vec6f>(j, i)[0];
float lambda_2 = myHarris_dst.at<Vec6f>(j, i)[1];
Mc.at<float>(j,i) = lambda_1*lambda_2 - 0.04f*pow( ( lambda_1 + lambda_2 ), 2 );
}
}
minMaxLoc( Mc, &myHarris_minVal, &myHarris_maxVal, 0, 0, Mat() );
/* Create Window and Trackbar */
namedWindow( myHarris_window, WINDOW_AUTOSIZE );
createTrackbar( " Quality Level:", myHarris_window, &myHarris_qualityLevel, max_qualityLevel, myHarris_function );
myHarris_function( 0, 0 );
myShiTomasi_dst = Mat::zeros( src_gray.size(), CV_32FC1 );
cornerMinEigenVal( src_gray, myShiTomasi_dst, blockSize, apertureSize, BORDER_DEFAULT );
minMaxLoc( myShiTomasi_dst, &myShiTomasi_minVal, &myShiTomasi_maxVal, 0, 0, Mat() );
/* Create Window and Trackbar */
namedWindow( myShiTomasi_window, WINDOW_AUTOSIZE );
createTrackbar( " Quality Level:", myShiTomasi_window, &myShiTomasi_qualityLevel, max_qualityLevel, myShiTomasi_function );
myShiTomasi_function( 0, 0 );
waitKey(0);
return(0);
}
void myShiTomasi_function( int, void* )
{
myShiTomasi_copy = src.clone();
if( myShiTomasi_qualityLevel < 1 ) { myShiTomasi_qualityLevel = 1; }
for( int j = 0; j < src_gray.rows; j++ )
{ for( int i = 0; i < src_gray.cols; i++ )
{
if( myShiTomasi_dst.at<float>(j,i) > myShiTomasi_minVal + ( myShiTomasi_maxVal - myShiTomasi_minVal )*myShiTomasi_qualityLevel/max_qualityLevel )
{ circle( myShiTomasi_copy, Point(i,j), 4, Scalar( rng.uniform(0,255), rng.uniform(0,255), rng.uniform(0,255) ), -1, 8, 0 ); }
}
}
imshow( myShiTomasi_window, myShiTomasi_copy );
}
void myHarris_function( int, void* )
{
myHarris_copy = src.clone();
if( myHarris_qualityLevel < 1 ) { myHarris_qualityLevel = 1; }
for( int j = 0; j < src_gray.rows; j++ )
{ for( int i = 0; i < src_gray.cols; i++ )
{
if( Mc.at<float>(j,i) > myHarris_minVal + ( myHarris_maxVal - myHarris_minVal )*myHarris_qualityLevel/max_qualityLevel )
{ circle( myHarris_copy, Point(i,j), 4, Scalar( rng.uniform(0,255), rng.uniform(0,255), rng.uniform(0,255) ), -1, 8, 0 ); }
}
}
imshow( myHarris_window, myHarris_copy );
}结果
以上内容是否对您有帮助:


更多建议: