


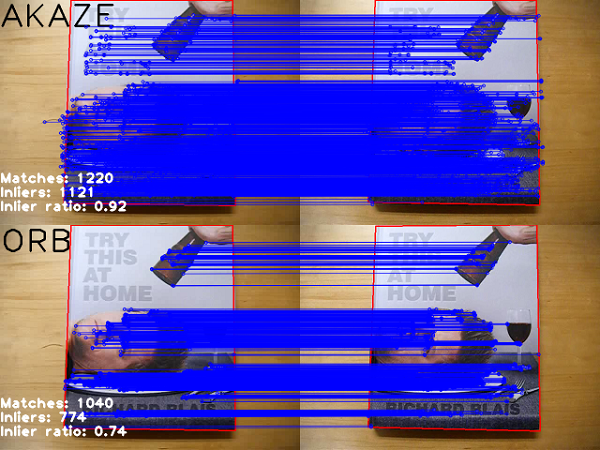
AKAZE和ORB平面跟踪
2018-10-13 11:11 更新
介绍
在本教程中,我们将使用它们比较AKAZE和ORB本地功能,以查找视频帧和跟踪对象移动之间的匹配。
算法如下:
- 检测并描述第一帧上的关键点,手动设置对象边界
- 对于每一个下一帧:
- 检测并描述关键点
- 使用bruteforce匹配器匹配它们
- 使用RANSAC估计单变图
- 过滤来自所有比赛的内置值
- 将单变图应用于边界框以找到对象
- 绘制边界框和内联,计算不定式比值作为评估指标
数据
要进行跟踪,我们需要第一帧上的视频和对象位置。
您可以从这里下载我们的示例视频和数据。
要运行代码,您必须指定输入(摄像机ID或video_file)。然后,使用鼠标选择边框,然后按任意键开始跟踪
./planar_tracking blais.mp4
源代码
#include <opencv2/features2d.hpp>
#include <opencv2/videoio.hpp>
#include <opencv2/opencv.hpp>
#include <opencv2/highgui.hpp> //for imshow
#include <vector>
#include <iostream>
#include <iomanip>
#include "stats.h" // Stats structure definition
#include "utils.h" // Drawing and printing functions
using namespace std;
using namespace cv;
const double akaze_thresh = 3e-4; // AKAZE detection threshold set to locate about 1000 keypoints
const double ransac_thresh = 2.5f; // RANSAC inlier threshold
const double nn_match_ratio = 0.8f; // Nearest-neighbour matching ratio
const int bb_min_inliers = 100; // Minimal number of inliers to draw bounding box
const int stats_update_period = 10; // On-screen statistics are updated every 10 frames
namespace example {
class Tracker
{
public:
Tracker(Ptr<Feature2D> _detector, Ptr<DescriptorMatcher> _matcher) :
detector(_detector),
matcher(_matcher)
{}
void setFirstFrame(const Mat frame, vector<Point2f> bb, string title, Stats& stats);
Mat process(const Mat frame, Stats& stats);
Ptr<Feature2D> getDetector() {
return detector;
}
protected:
Ptr<Feature2D> detector;
Ptr<DescriptorMatcher> matcher;
Mat first_frame, first_desc;
vector<KeyPoint> first_kp;
vector<Point2f> object_bb;
};
void Tracker::setFirstFrame(const Mat frame, vector<Point2f> bb, string title, Stats& stats)
{
cv::Point *ptMask = new cv::Point[bb.size()];
const Point* ptContain = { &ptMask[0] };
int iSize = static_cast<int>(bb.size());
for (size_t i=0; i<bb.size(); i++) {
ptMask[i].x = static_cast<int>(bb[i].x);
ptMask[i].y = static_cast<int>(bb[i].y);
}
first_frame = frame.clone();
cv::Mat matMask = cv::Mat::zeros(frame.size(), CV_8UC1);
cv::fillPoly(matMask, &ptContain, &iSize, 1, cv::Scalar::all(255));
detector->detectAndCompute(first_frame, matMask, first_kp, first_desc);
stats.keypoints = (int)first_kp.size();
drawBoundingBox(first_frame, bb);
putText(first_frame, title, Point(0, 60), FONT_HERSHEY_PLAIN, 5, Scalar::all(0), 4);
object_bb = bb;
delete[] ptMask;
}
Mat Tracker::process(const Mat frame, Stats& stats)
{
TickMeter tm;
vector<KeyPoint> kp;
Mat desc;
tm.start();
detector->detectAndCompute(frame, noArray(), kp, desc);
stats.keypoints = (int)kp.size();
vector< vector<DMatch> > matches;
vector<KeyPoint> matched1, matched2;
matcher->knnMatch(first_desc, desc, matches, 2);
for(unsigned i = 0; i < matches.size(); i++) {
if(matches[i][0].distance < nn_match_ratio * matches[i][1].distance) {
matched1.push_back(first_kp[matches[i][0].queryIdx]);
matched2.push_back( kp[matches[i][0].trainIdx]);
}
}
stats.matches = (int)matched1.size();
Mat inlier_mask, homography;
vector<KeyPoint> inliers1, inliers2;
vector<DMatch> inlier_matches;
if(matched1.size() >= 4) {
homography = findHomography(Points(matched1), Points(matched2),
RANSAC, ransac_thresh, inlier_mask);
}
tm.stop();
stats.fps = 1. / tm.getTimeSec();
if(matched1.size() < 4 || homography.empty()) {
Mat res;
hconcat(first_frame, frame, res);
stats.inliers = 0;
stats.ratio = 0;
return res;
}
for(unsigned i = 0; i < matched1.size(); i++) {
if(inlier_mask.at<uchar>(i)) {
int new_i = static_cast<int>(inliers1.size());
inliers1.push_back(matched1[i]);
inliers2.push_back(matched2[i]);
inlier_matches.push_back(DMatch(new_i, new_i, 0));
}
}
stats.inliers = (int)inliers1.size();
stats.ratio = stats.inliers * 1.0 / stats.matches;
vector<Point2f> new_bb;
perspectiveTransform(object_bb, new_bb, homography);
Mat frame_with_bb = frame.clone();
if(stats.inliers >= bb_min_inliers) {
drawBoundingBox(frame_with_bb, new_bb);
}
Mat res;
drawMatches(first_frame, inliers1, frame_with_bb, inliers2,
inlier_matches, res,
Scalar(255, 0, 0), Scalar(255, 0, 0));
return res;
}
}
int main(int argc, char **argv)
{
CommandLineParser parser(argc, argv, "{@input_path |0|input path can be a camera id, like 0,1,2 or a video filename}");
parser.printMessage();
string input_path = parser.get<string>(0);
string video_name = input_path;
VideoCapture video_in;
if ( ( isdigit(input_path[0]) && input_path.size() == 1 ) )
{
int camera_no = input_path[0] - '0';
video_in.open( camera_no );
}
else {
video_in.open(video_name);
}
if(!video_in.isOpened()) {
cerr << "Couldn't open " << video_name << endl;
return 1;
}
Stats stats, akaze_stats, orb_stats;
Ptr<AKAZE> akaze = AKAZE::create();
akaze->setThreshold(akaze_thresh);
Ptr<ORB> orb = ORB::create();
Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create("BruteForce-Hamming");
example::Tracker akaze_tracker(akaze, matcher);
example::Tracker orb_tracker(orb, matcher);
Mat frame;
namedWindow(video_name, WINDOW_NORMAL);
cout << "\nPress any key to stop the video and select a bounding box" << endl;
while ( waitKey(1) < 1 )
{
video_in >> frame;
cv::resizeWindow(video_name, frame.size());
imshow(video_name, frame);
}
vector<Point2f> bb;
cv::Rect uBox = cv::selectROI(video_name, frame);
bb.push_back(cv::Point2f(static_cast<float>(uBox.x), static_cast<float>(uBox.y)));
bb.push_back(cv::Point2f(static_cast<float>(uBox.x+uBox.width), static_cast<float>(uBox.y)));
bb.push_back(cv::Point2f(static_cast<float>(uBox.x+uBox.width), static_cast<float>(uBox.y+uBox.height)));
bb.push_back(cv::Point2f(static_cast<float>(uBox.x), static_cast<float>(uBox.y+uBox.height)));
akaze_tracker.setFirstFrame(frame, bb, "AKAZE", stats);
orb_tracker.setFirstFrame(frame, bb, "ORB", stats);
Stats akaze_draw_stats, orb_draw_stats;
Mat akaze_res, orb_res, res_frame;
int i = 0;
for(;;) {
i++;
bool update_stats = (i % stats_update_period == 0);
video_in >> frame;
// stop the program if no more images
if(frame.empty()) break;
akaze_res = akaze_tracker.process(frame, stats);
akaze_stats += stats;
if(update_stats) {
akaze_draw_stats = stats;
}
orb->setMaxFeatures(stats.keypoints);
orb_res = orb_tracker.process(frame, stats);
orb_stats += stats;
if(update_stats) {
orb_draw_stats = stats;
}
drawStatistics(akaze_res, akaze_draw_stats);
drawStatistics(orb_res, orb_draw_stats);
vconcat(akaze_res, orb_res, res_frame);
cv::imshow(video_name, res_frame);
if(waitKey(1)==27) break; //quit on ESC button
}
akaze_stats /= i - 1;
orb_stats /= i - 1;
printStatistics("AKAZE", akaze_stats);
printStatistics("ORB", orb_stats);
return 0;
}说明
跟踪类
该类实现了使用给定的特征检测器和描述符匹配器描述的算法。
- 设置第一帧
void Tracker::setFirstFrame(const Mat frame, vector<Point2f> bb, string title, Stats& stats)
{
first_frame = frame.clone();
(*detector)(first_frame, noArray(), first_kp, first_desc);
stats.keypoints = (int)first_kp.size();
drawBoundingBox(first_frame, bb);
putText(first_frame, title, Point(0, 60), FONT_HERSHEY_PLAIN, 5, Scalar::all(0), 4);
object_bb = bb;
}我们从第一帧计算并存储关键点和描述符,并准备输出。
我们需要保存检测到的关键点的数量,以确保两个检测器的位置大致相同。
- 处理框架
1、找到关键点并计算描述符
(*detector)(frame, noArray(), kp, desc);
要找到帧之间的匹配,我们必须先找到关键点。
在本教程中,检测器设置为在每个帧上找到约1000个关键点。
2、使用2-nn匹配器查找通信
matcher->knnMatch(first_desc, desc, matches, 2);
for(unsigned i = 0; i < matches.size(); i++) {
if(matches[i][0].distance < nn_match_ratio * matches[i][1].distance) {
matched1.push_back(first_kp[matches[i][0].queryIdx]);
matched2.push_back( kp[matches[i][0].trainIdx]);
}
}如果最接近的匹配是nn_match_ratio比第二个最接近的匹配,那么它是一个匹配。
3、使用RANSAC估计单变图
homography = findHomography(Points(matched1), Points(matched2),
RANSAC, ransac_thresh, inlier_mask);如果有至少4场比赛,我们可以使用随机抽样共识来估计图像变换。
4、保存内在的
for(unsigned i = 0; i < matched1.size(); i++) {
if(inlier_mask.at<uchar>(i)) {
int new_i = static_cast<int>(inliers1.size());
inliers1.push_back(matched1[i]);
inliers2.push_back(matched2[i]);
inlier_matches.push_back(DMatch(new_i, new_i, 0));
}
}因为findHomography可以计算内部值,所以我们只需要保存所选的点和匹配项。
5、项目对象边界框
perspectiveTransform(object_bb,new_bb,singography); 如果有合理数量的内部值,我们可以使用估计转换来定位对象。
结果
AKAZE统计:
Matches 626
Inliers 410
Inlier ratio 0.58
Keypoints 1117ORB统计:
Matches 504
Inliers 319
Inlier ratio 0.56
Keypoints 1112以上内容是否对您有帮助:


更多建议: